- Equipment:
- camera with IR illuminators for day and night vision – weight [kg]: 2.1,
- lasers (2 pcs.),
- safety switch,
- weight:[kg]: 2,1
- dimensions [cm]: 12-20.5(W) x 14(H) x 11(L)
 enables mounting a Benelli M4 Super 90 rifle
enables mounting a Benelli M4 Super 90 rifle- equipped with laser sight, accessories connector and safety switch
- materials: steel + aluminium
- weight [ kg]: 3
- dimensions [cm]: 68(L) x 24(H) x 10.5(W)
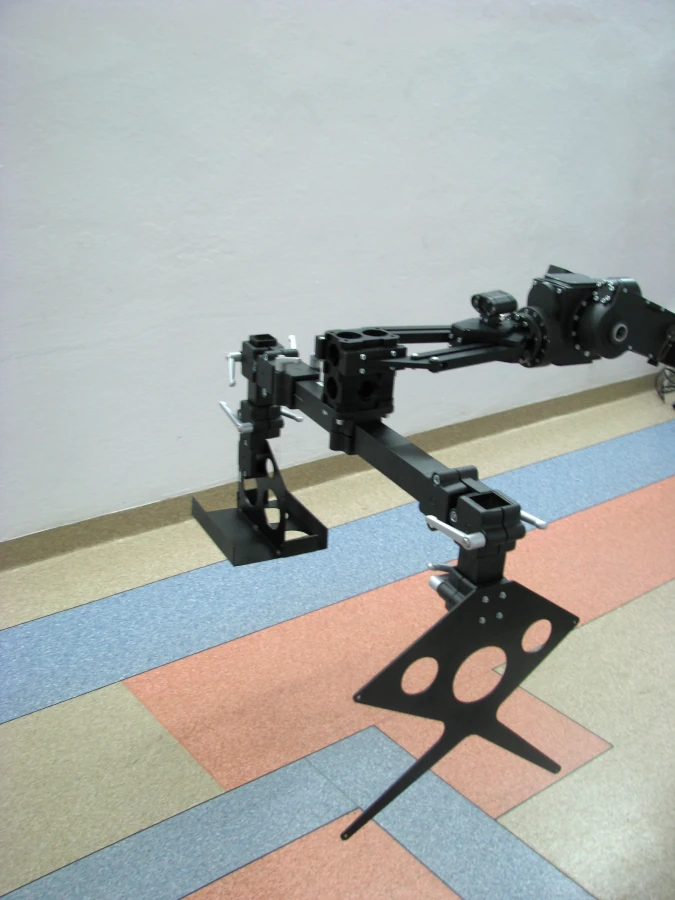
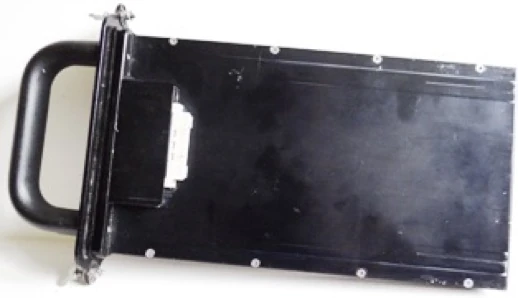
 PIAP IBIS robot works with an X-ray device with dispensable screens
PIAP IBIS robot works with an X-ray device with dispensable screens- adapter for X-ray device is composed of:
- adapter to mount the device in the gripper
- telescopic boom
- screen holder
- radiation generator holder
- compatible with AP2C sensor




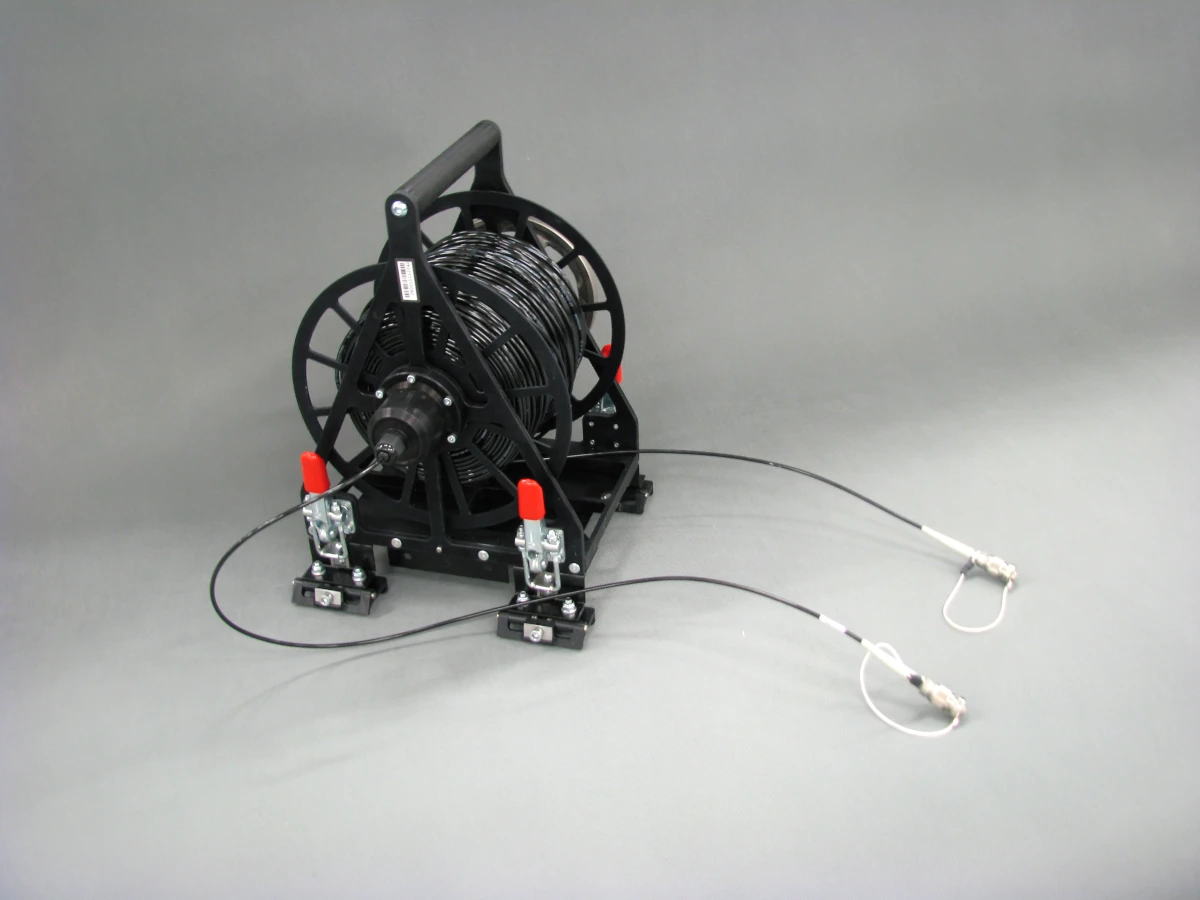
- enables steering the robot without radio communication
- essential for connecting the repeater
- the passive fibre optic cable winder set consists of:
- body
- crank
- short fibre optic cable
- long fibre optic cable (on the reel)
- RIS rail holders
- weight [kg]: 3.1
- dimensions [cm]: 21(L) x 25(W) x 28(H)
- technical specification of the fibre optic:
- minimum bending radius: 25mm
- maximum tensile force: 300N (30.5 kg)
- Available length: [m]: 150, 300
 enables steering the robot without radio communication
enables steering the robot without radio communication- cable length: up to 300m
- weight [kg]: 6.15
- dimensions [cm]: 28(L) x 23(W) x 24(H)

 for remote detonation of the explosives
for remote detonation of the explosives
 enables remote location of antennae
enables remote location of antennae
 PIAP IBIS works with a negotiation kit which consists of:
PIAP IBIS works with a negotiation kit which consists of:
two microphones and one loudspeaker installed on the mobile base and a microphone connected to the control panel- Negotiation kit requires fibre optic remote control

 Digital recorder for recording image obtained from the robot
Digital recorder for recording image obtained from the robot


 small steering panel
small steering panel- internal battery (charger 230v)
- weight [kg]: 0.43
- dimensions [cm]: 16.5(L) x 11(W) x 3.5 [+3.5 joysticks] (H)
- range: [m]: 10 (in the open area)
- operating time: estimated at min. 1h

 additional battery for the control panel
additional battery for the control panel
- additional battery for the mobile base
- Enables continuous work of the control panel, while connecting to power source
 Doubles the operating capacity of the robot
Doubles the operating capacity of the robot- Requires the installation of fibre optic cable or passive fibre optic winder.

 the device works automatically and requires no other action from the operator
the device works automatically and requires no other action from the operator- the breaker consists of a the bolt terminated with sintered carbide and an inner hammer system. The housing allows the device to be held with gripper jaws.
 Environmental swab
Environmental swab- Ground sampler
- Forensic samplers set
- SPME adsorber
- R – Sensor (integrated EKO-C)

 Knocking windows, knocking holes in surfaces and lock fittings or other small parts
Knocking windows, knocking holes in surfaces and lock fittings or other small parts
(the principle of „pile driver”)- Piercing objects, e.g. tires
- Breaking hinges
- Cutting metal rods, cables, wires, chains, tubes
- Cutting off elements
- Initiating non-electric detonators such as STS, NDS, NONEL
- Basic operating tips:
- Cutter for cable, wire and rod;
- Punches for windows and other components;
- Triggers to initiate explosion with non-electric detonation systems;
- Cutters (knives and blades)- Possibility of designing tips for specific needs of the user

 for detection of errors and faults in the robot
for detection of errors and faults in the robot- for changing settings and configuration of the robot
- accessories and SVGA connector

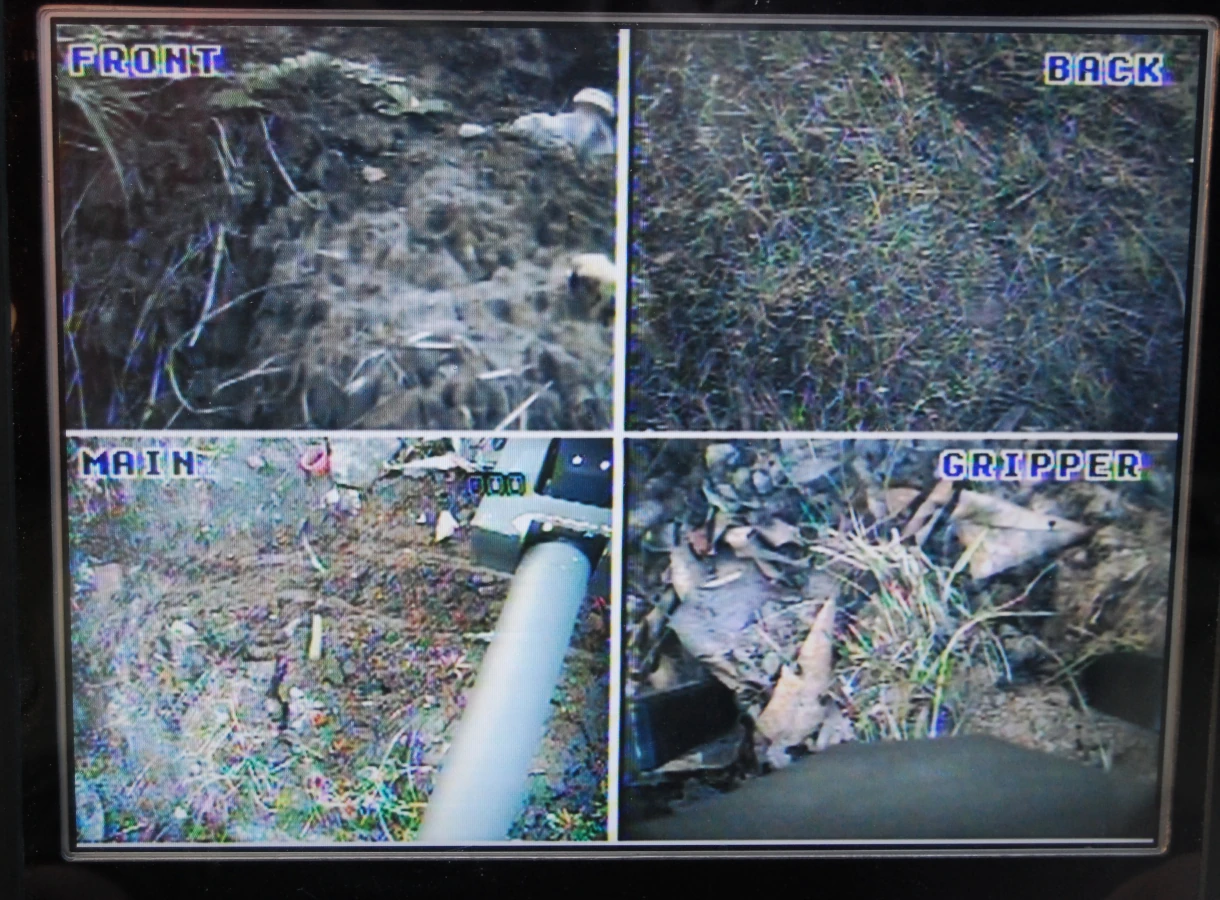
 enables vision at night
enables vision at night- fixed near the gripper camera
- power supply from the robot
- remote turn off function located near the camera view switch
- dimensions [cm]: 20(L) x 9 (H)
- line with a hook to tow a car